Modeling and Simulation of a Spacecraft Payload Hardware Using Machine Learning Techniques
Quality assurance is an integral part of the product life-cycle of any safety critical software, such as On-board Software (OBSW) for aviation and space systems. Modern aerospace systems have a modular structure consisting of several subsystems and components [1]. These components interact with each other to fulfill a common task and ultimately achieve the mission goal. With an increasing number of components and their interactions, the complexity of the system rises [1]. Software that drives such a complex system must be robust and resilient to a wide variety of failures. In order to ensure that all features of the OBSW work as expected, they must be thoroughly tested on the component, the subsystem, and the system level.
Aerospace projects are often carried out in collaborations between agencies, research institutions, universities, or industries. In such collaborations, the development process of the system gets divided among project partners. Although an agency manufactures a hardware component, for example, it may not develop the accompanying control software. Another institute located in a different location might be responsible for the software components. In such a case, the software integration can be troublesome. In order to properly test communication modules of an OBSW, a Hardware-in-the-Loop (HiL) test environment is necessary, where all required hardware components are present.
Duplication of the missing hardware for each development site is often unfeasible due to their high complexity and manufacturing cost. When a peripheral hardware is missing, OBSW developers use mock-up methods to mimic the input/output signals of the hardware. Without deep domain knowledge, mock-up methods cannot account for the dynamic behavior of the system. Often, they produce only a random value within a given range or just return a default value. Using mock-up methods in testing the complex software may lead to incorrect test results. OBSW developers have to deal with this kind of shortcomings.
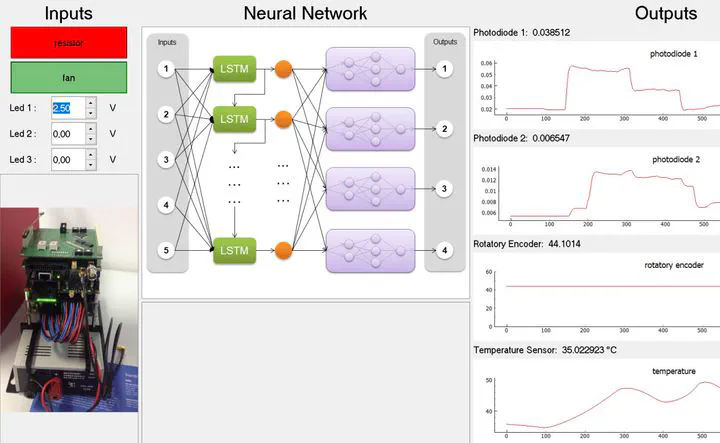
In this paper, we address this problem by presenting a methodology to synthesize a model with the data collected from the real payload hardware using Machine Learning (ML) techniques. The black-box model can be used to communicate with the OBSW on behalf of the real hardware to test the OBSW functionalities. We model the payload hardware along with its environment which includes modeling the behavior of sensors and actuators connected to the device over an extended period of time. We achieve this by reformulating the problem into a time series prediction problem (temporal sequence modeling), so that we can exploit well-studied ML algorithms from the field. Specifically, we explore the state-of-the-art deep learning algorithms from the Recurrent Neural Network (RNN) family.